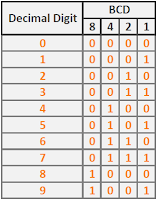
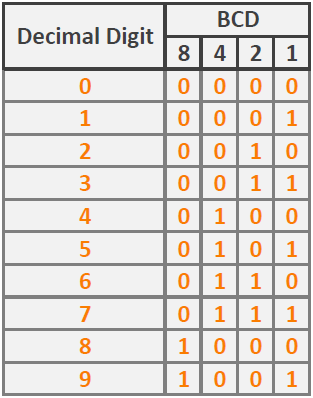
Binary Coded Decimal (BCD) is a class of binary encoding of decimal numbers where each decimal digit is represented by a fixed number of bits, usually four or eight[1]. BCD is also called "8421" encoding. This is the truth table of BCD encoding, where each decimal digits is represented by its corresponding 4-bit binary value:
For example, 16810 (101010002) is represented as "0001 0110 1000" in BCD format. In this tutorial, I will implementing a digital circuit for adds 1 to a number in BCD format. The BCD format is three-digit decimal number (12-bit). For example, after incrementing, "0010 0101 1001" (25910) becomes "0010 0110 0000" (26010).
This is the top level schematic for three-digit BCD incrementor. This circuit is actually consist of three 4-bit incrementor module. 4-bit incrementor has input signal of BCD number and output signal of incremented BCD number. There is also a carry output signal that give indication when an incremented BCD number rollover (from 910 (10012) to 010 (00002)). In the three-digit incrementor circuit, this carry signal is used for give a signal to the next 4-bit incrementor module to increment the digit.
For example, 16810 (101010002) is represented as "0001 0110 1000" in BCD format. In this tutorial, I will implementing a digital circuit for adds 1 to a number in BCD format. The BCD format is three-digit decimal number (12-bit). For example, after incrementing, "0010 0101 1001" (25910) becomes "0010 0110 0000" (26010).
This is the top level schematic for three-digit BCD incrementor. This circuit is actually consist of three 4-bit incrementor module. 4-bit incrementor has input signal of BCD number and output signal of incremented BCD number. There is also a carry output signal that give indication when an incremented BCD number rollover (from 910 (10012) to 010 (00002)). In the three-digit incrementor circuit, this carry signal is used for give a signal to the next 4-bit incrementor module to increment the digit.



